

工程案例
ADAS时空交融数据收集计划共享?
时间: 2025-04-30 18:08:25
作者: 必发集团welcome
。但是,跟着传感器数量的添加和数据规划的指数级增加,职业正面对一系列应战:
根据技能堆集与职业洞悉,本文共享一套立异的ADAS时空交融数据收集计划。经过硬件与软件的深度协同优化,能够很好地处理数据收会集的中心痛点,还为无人驾驶研制供给了高效、牢靠、可扩展的完好处理计划。
该计划以“时空交融”为中心,构建了传感器层、数据处理层、存储层和用户交互层,如下图1所示:
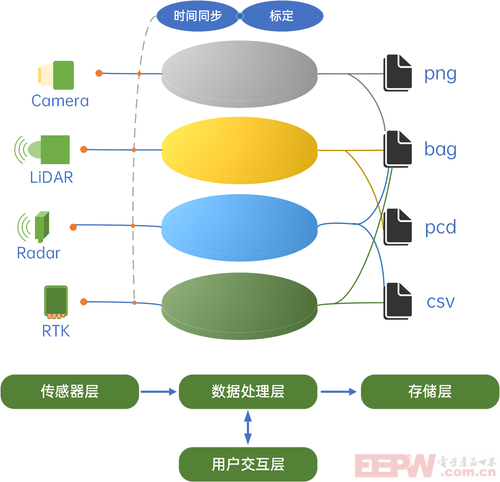
传感器层:担任收集数据,包括 LiDAR、Radar、RTK 和 Camera 等传感器。这些传感器从不同维度感知环境,取得图画、点云、高精度定位以及被测方针物等信息,为体系供给原始数据。
数据处理层:对传感器收集的原始数据做处理。经过时刻同步算法(PTP/gPTP),使不同传感器数据在时刻上对齐,处理多源传感器数据时刻同步难题。运用标定算法,对各传感器进行单传感器标定和传感器间标定,确认传感器之间的空间联络。一起,解析不同格局的数据,使其能在体系中一致处理。
存储层:担任存储处理后的数据。支撑多种存储格局,如激光雷达数据可存为 pcd 格局或 rosbag 包,毫米波雷达和 RTK 数据可挑选 csv 格局或 rosbag 包,便利不同场景下的数据运用和剖析。而且依照传感器类型将数据分类存入独自文件夹,便于管理和查找。
用户交互层(软件界面):为用户更好的供给操作进口。软件支撑各个传感器数据的可视化,便使用户实时检查传感器收集的信息。答应用户对数据收集进行多种装备,如挑选存储途径、设置摄像头收集帧数、挑选显现时刻戳的来历等。还支撑对收集环境进行描绘,如记载气候和路途情况,为后续数据剖析供给更丰厚的布景信息。
根据计划架构的功能性规划,体系建立如图2所示,包括线束改造,时刻同步,传感器标定和数据收集。
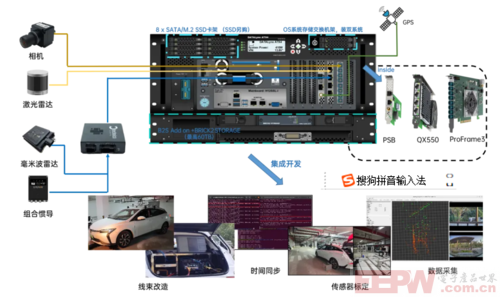
线束改造方面,选用模块化线束规划,针对不同传感器的接口特性进行定制化适配:
(1)多协议兼容:支撑以太网(LiDAR)、CAN 总线(Radar/RTK)、ProFrame(Camera)等多种通信协议,经过标准化接口完成传感器即插即用,大幅度缩短设备集成周期。
(2)轻量化布局:根据车辆工程规划,线束走向遵从最短途径准则,削减冗余布线,提高体系牢靠性的一起便于后期保护。
(3)抗搅扰优化:选用屏蔽线缆与差分信号传输,下降电磁搅扰对数据质量的影响,保证高速率数据(如 LiDAR 点云、Camera 原始图画)的安稳传输。
计划经过硬件触发 + 软件校准完成多传感器纳秒级时刻同步,保证时空交融精度:
(1)同步基准一致:以世界原子时(TAI)为时刻基准,经过gPTP(通用准确时刻协议)与 PPS(秒脉冲信号)完成体系级时刻对齐。LiDAR选用gPTP 同步,Camera 经过收集卡 PPS 信号触发,RTK 与 Radar 经过 CAN Combo 的打上时刻戳。
(2)外触发机制:支撑LiDAR 外触发Camera 拍照,可自定义触发频率(10Hz/20Hz/30Hz),保证图画与点云数据严厉同步。实测显现,8MP 相机在 30Hz 触发下,帧间对齐时刻差错小于 10μs(一般差错在20-30ms)。
比方单传感器标定中LiDAR2Car,以车辆后轴中心为原点,经过标定板收集点云数据,使用迭代最近点(ICP)算法核算 4×4 改换矩阵,完成点云到车辆坐标系的转化。
传感器间标定中LiDAR2Camera,使用同步收集的点云与图画数据,经过标定板特征匹配,核算外参矩阵(旋转矩阵 R、平移向量 T),重投影差错均值 0.0138m,支撑点云投影到图画像素坐标。
(1)多模态可视化:实时显现 LiDAR 点云、Camera 图画、Radar 方针聚类及 RTK 定位信息,支撑分屏监控与时刻戳同步显现,便于实时校验数据质量。
环境标示:自动记载气候(晴 / 雨 / 雾)、路途类型(城市 / 高速 / 村庄)等元数据,生成包括时刻戳、存储途径、传感器装备的场景收集文件,提高数据可追溯性。
(3)安稳存储计划:按传感器类型生成独立文件夹(如 LiDAR_data、Radar_data),防止数据稠浊。
经过线束改造、时刻同步、传感器标定与收集软件的深度协同,以上计划能够体系性处理了多源数据收会集的时空对齐、格局适配与高效存储难题。
具体内容现已经过实车测验验证,支撑厘米级空间定位与纳秒级时刻同步,为无人驾驶算法研制、传感器交融验证供给了牢靠的数据柱石。
*博客内容为网友个人发布,仅代表博主个人自己的观念,如有侵权请联络工作人员删去。

 电话:
电话: 手机:
手机: 邮箱:
邮箱: 地 址:
地 址: